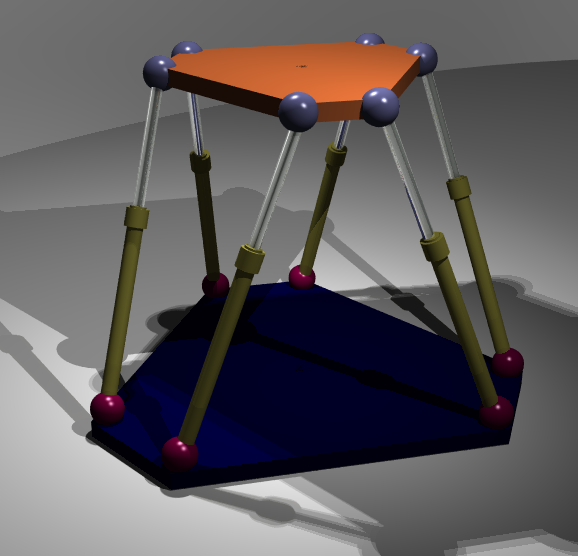
Для компании Си Проект. я разработал модель гексопода – платформы Гью-Стюарта. Данная установка нужна для компенсации качки корабля. В качестве имитации качки были выбраны три параметризированные синусоиды.
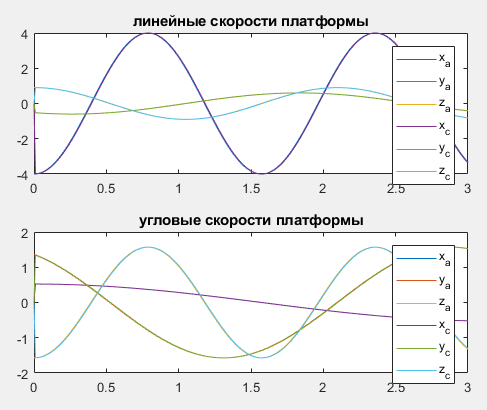
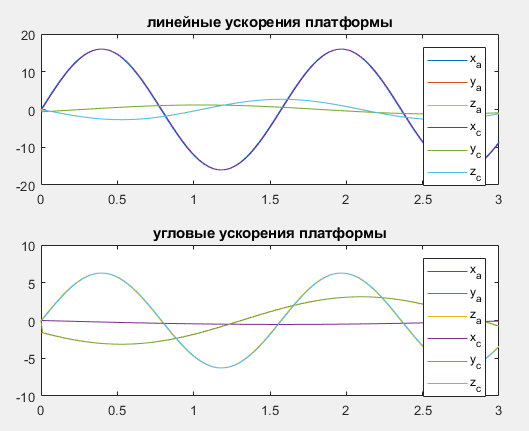
По ним задавались углы ориентации платформы, а также угловые скорости и ускорения. Необходимо было восстановить по ним положения, углы и скорости штоков.
Скорости и ускорения потребовалось свести в единый вектор угловой скорости. Для этого пришлось строить матрицы поворота вдоль каждой из осей и вычислять единый угол для композиции вращений.
Моделирование было выполнено с помощью Matlab.