Для компании «АКМ», подрядчика петербуржского метростроя, я составил описание системы управления роботом-ровером, а также техническое задание на разработку платы управления и нашёл исполнителя
Робот предназначен для демонтажа железо-бетонных конструкций. Также его используют для разбивания кембрийских глин. Метро прокладывают зачастую как раз на уровне их залегания. Эти глины очень прочные, чтобы их извлечь, нужно их сначала разрушить: либо ручным отбойным молотком, либо таким роботом.
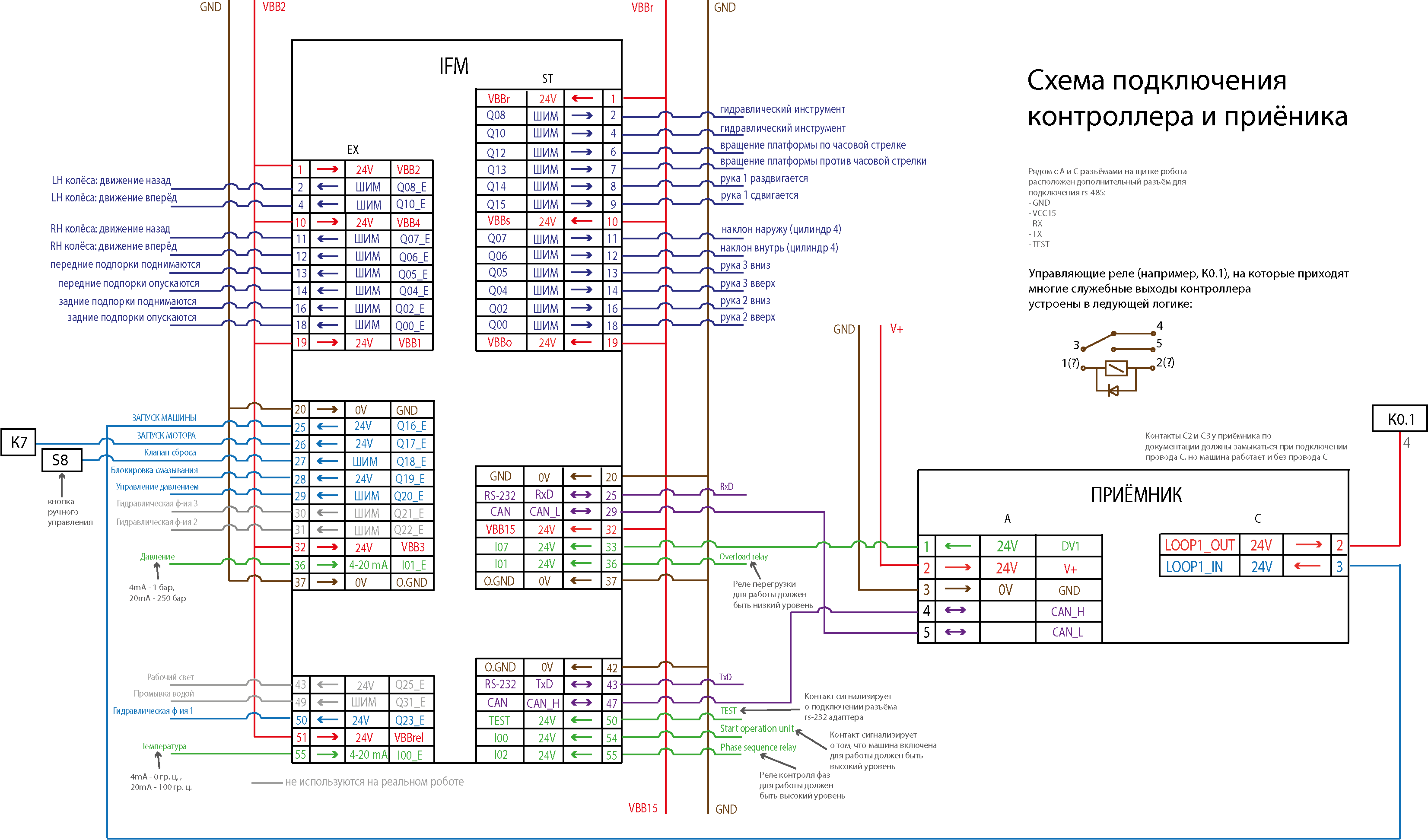
Для управления роботом использовался контроллер IFM CR0232. В связи с санкциями, стоимость приобретения контроллера стала превышать проектирование и изготовление своего собственного.
Робот построен на пропорциональных гидравлических клапанах, которые управляют цилиндрами.
Для управления клапанами, использовался токовый ШИМ. Для проверки реальных сигналов я собрал плату на ESP32 и датчике тока INA219. Т.к. ноутбук было некуда поставить, то я написал клиент с помощью Android. С помощью стенда были измерены все каналы. Реальные токи не превышали 700мА.

Для составления комплекса команд я написал сниффер, уже под управлением компьютера, т.к. шину CAN можно было далеко протянуть, а непосредственное управление не требовало создания скриншотов. Команды накапливались и раскладывались с помощью адаптера (ESP32 и MCP2515) и программы-клиента, написанной на Java.
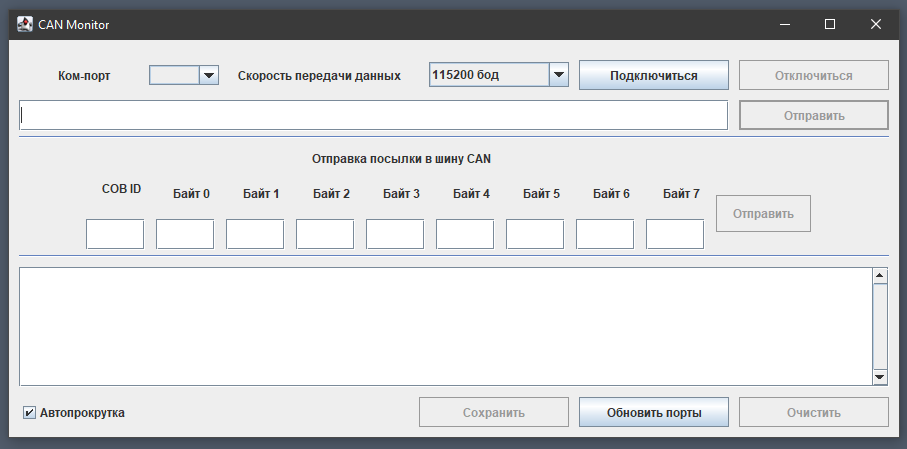
Когда пакеты появлялись в сети, они добавлялись в виде списка:

После того, как полный комплект документации был готов, я нашёл исполнителя из Самары, который уже проектировал контроллеры с токовым ШИМ. Схемотехника этих каналов была самой сложной, остальные дополнения были некритичными.