Чтобы получить координаты рабочего инструмента робота-манипулятора в мировой системе координат, нужно составить матрицы перехода из каждого звена в следующее. Для этого каждое звено параметризуется четырьмя значениями: два отвечают за расстояния между звеньями, два – за повороты. Эти параметры называют параметрами Денавита-Хартенберга или ДХ-параметрами.
Для составления ДХ-параметров реального робота недостаточно составить кинематическую схему, требуется совместить нулевые точки (точки отсчёта углов) в звеньях робота. Точки отсчёта углов в каждом из сочленений робота не стандартизированы. Поэтому ДХ-параметры, составленные по кинематической схеме, могут давать положения рабочего инструмента, качественно отличные от реальных.
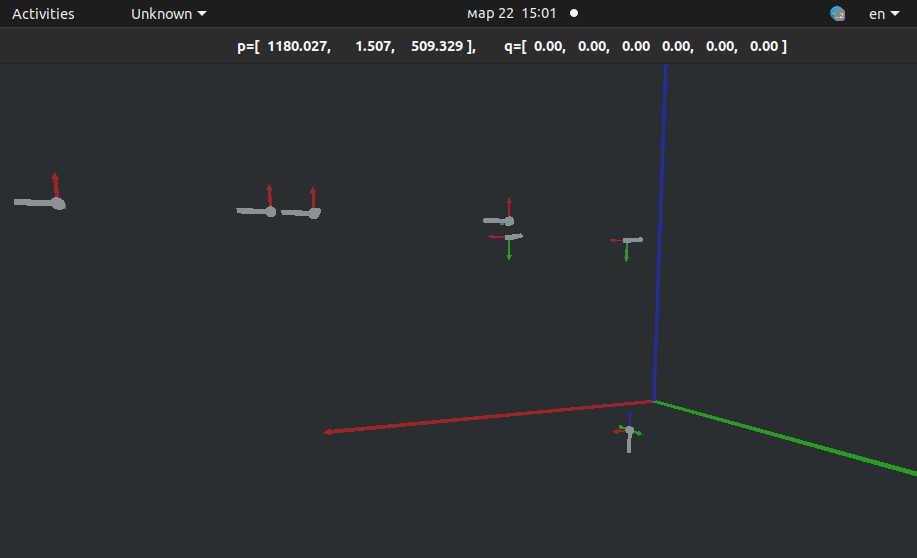
Для определения точек отсчёта и уточнения ДХ параметров была написана 3D программа
визуализации параметров ДХ (C++ и OpenGL) Исходники можно скачать здесь.